155-0076-00

The Tektronix M94 (P/N 155-0076-00) is an input protection and probe logic monolithic integrated circuit in a 16-pin minipac package, designed by John Addis in 1971.
Datasheet
Internals
The M94 has four subcircuits:
- DC current sources for biasing
- Decoder for the probe attenuation pin signal
- RMS detector
- Output logic and drivers for coil of relay that sets input impedance of scope
The M94 uses an IC fabrication process with NPN and PNP transistors. The NPN devices in this fabrication process have good performance and a beta around 100. In contrast, the PNP transistors are poor-performing lateral devices with beta around 8.
Biasing
At the bottom of the schematic, there is an NPN current mirror providing 13 current sinks. The mirror is biased such that each of the 13 emitter resistors has one volt across it.
Probe Readout Ring Decoder
The M94 has a circuit for decoding the probe attenuation factor based on the probe readout pin. The probe readout pin contacts the readout ring on the probe input of the scope. The readout ring is pulled up to 5 volts by a 5 kΩ resistor outside of the M94. Inside the probe, there is a resistor between the readout pin and the ground of the BNC connector. This scheme allows the scope to distinguish 1x, 10x, and 100x probes, and adjust on-screen readout scale accordingly, so that the on-screen scale is referenced to the voltage at the probe tip. Letting the ring float represents a ×1 probe. 11 kΩ to ground represents a ×10 probe. 6.2 kΩ to ground represents a ×100 probe.
When the ring is left floating, it is pulled up to 5 volts. In this case, the voltages are as shown in the schematic. Q62, Q56, and Q51 are on, and Q63, Q57, and Q52 are off. Current is allowed to flow out of the base of Q68, and consequently the darlington pair of Q69 and Q70 is turned on, sinking current from the ×1 pin of the M94.

When a 10x probe is connected, the voltage of the probe pin ring is determined by a voltage divider formed by the 5 kΩ resistor (to +5 V) in the scope and the 11 kΩ resistor (to ground) in the probe. The voltage at pin 11 of the M94 is 3.44 V. Q62 is off and Q63 is on. Current is allowed to flow out of the base of Q64, and Q65 and Q66 are on. The ×10 pin of the M94 is sinking current.

When a 100x probe is connected, the voltage at pin 11 is 2.77 V. Q57 is on and Q56 is off. Since Q56 is off, there is no tail current in the Q62/Q63 pair. The collector of Q57 pulls current from the base of Q58, which turns on Q59 and Q60. The ×100 pin sinks current.

Some probes have an "identify" button. When pressed, that button shorts the probe detect pin to ground. In that situation, pin 11 of the M94 is at ground potential and the identify switch is sinking 200 μA from the 5 kΩ pullup resistor. Q52 is on. Q51 is off, and there is no tail current in Q56/Q57, and the same with Q62/Q63. The ID pin is sinking current.

RMS Converter
Output Logic
The objective of the output logic is to protect the 50 Ω input attenuator from overheating. The strategy is to build an electrical model of the 50 Ω attenuator's thermal dynamics, and to disconnect the input signal from the relatively fragile 50 Ω attenuator if further electrical input would put it at risk of overheating.
The collector current of Q27 is quasi-proportional to the instantaneous power dissipated in the 50 Ω input attenuator. This current is applied to a leaky integrator. The electrical time constant of the leaky integrator matches the thermal time constant of the most vulnerable parts of the 50 Ω input attenuator. In the case of the 11A52, this is a simple RC circuit with a time constant of 294 milliseconds. The voltage at pin 1 (base of Q33) is inversely related to the modeled temperature of the attenuator.
A 3.0 volt reference is established at the base of Q34.
The voltage on pin 1 is compared with the 3.0 volt reference.
When the input is not overloaded, the 0.1 mA tail current of Q33/Q34 is steered to the Q33's side and Q32 is cut off.
When the input is overloaded, the voltage at the base of Q33 dips below 3.0 volts, and the tail current is steered to Q34's side. This turns on Q32.
Thus, the collector current of Q32 is essentially a digital signal: on means overload, off means no overload.

Q36, Q37, Q38, and Q39 form an RS flip-flop. When input overload is detected, Q32 turns on, supplying current to the base of Q36. The collector voltage of Q36 and Q37 goes to around 0 V. The pin 13 "MODE INPUT" pin is normally grounded, e.g., in the 485. In this state, Q38 and Q39 are cut off and their collectors are pulled up by R38. That causes a current to flow through R53, into the base of Q37, which keeps the collectors of Q36 and Q37 close to ground potential. So, once an overload condition is detected, the flip flop stays in the left-side-active state even after the input is removed.

When the excessive input signal has been removed and the operator wants to re-enable the 50 Ω input, pin 13 of the M94 is momentarily allowed to float high. In the 485, this is done by the operator pressing the impedance selector button on the front panel, S125B. Letting pin 13 float allows current to flow through R45, into the base of Q39. The resulting collector current in Q39 pulls the collector of Q38/Q39 low, which stops the current in R53, thus turning off Q37. Q36 is also off because the excessive input has been removed. So the collector of Q36/Q37 is pulled high by R36, which also turns on R38. This leaves the flip-flop in the stable right-side-active state.
When pin 13 is allowed to float high, current flows through R45 into the base of Q44. The collector of Q44 shunts the R43 current away from the base of Q42, thus cutting off the current in pin 12. So, in a 485, while the input impedance selector button is pressed, the input is disconnected from the 50 Ω attenuator.
There are two cases where the input relay should be de-energized, i.e., where the input should be connected to the 1 MΩ attenuator instead of the 50 Ω attenuator:
- The operator has selected 50 Ω input impedance, but input overload has been detected.
- The operator has selected 1 MΩ input impedance.
The first case is described above. It corresponds to the flip-flop being in the stable left-side-active state.
In the second case, where the operator has selected 1 MΩ input impedance, pin 13 is allowed to float high. This results in Q44 turning on and shunting current away from Q42, thus preventing the relay from being energized, leaving the input connected to the 1 MΩ attenuator. Note that if pin 13 is allowed to float high, the state of the flip-flop is of no consequence as far as the MODE RELAY output is concerned.
Links
Photos
-
M94 as U80 in 485
-

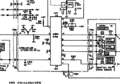
Early Pre-Production Schematic of Probe Coding Circuit. It was for the "455" which became the 485.


Used in
Some instruments using part 155-0076-00
| Instrument | Manufacturer | Class | Model | Description | Introduced |
|---|---|---|---|---|---|
| 11A52 | Tektronix | Plug-in | 11A52 | Dual channel 600 MHz amplifier | 1987 |
| 11A71 | Tektronix | Plug-in | 11A71 | Single channel 1 GHz amplifier | 1987 |
| 11A72 | Tektronix | Plug-in | 11A72 | Dual channel 1 GHz amplifier | 1989 |
| 465 | Tektronix | Oscilloscope | 465 | Portable 100 MHz dual-trace scope | 1972 |
| 485 | Tektronix | Oscilloscope | 485 | 350 MHz portable scope | 1972 |
| 7A29 | Tektronix | Plug-in | 7A29 | 1 GHz amplifier | 1978 |
| 7A29P | Tektronix | Plug-in | 7A29P | 1 GHz programmable amplifier | 1988 |
| SCD1000 | Tektronix | Oscilloscope | SCD1000 | 1 GHz transient digitizer | 1990 |